


Custom S550 Hexacopter

Especificações: Placa controladora de vôo Pixhawk 2.4.8; 6x motores Turnigy D3536 910KV Brushless Outrunner; 6x controladores eletrônicos de velocidade (ESCs) TURNIGY 40A; GPS Readytosky Ublox NEO M8N GPS; GPS (redundante) 3DR uBlox GPS com compasso; receptor FrSky X8R 8/16 canais; bateria LIPo 5200mah 4s 40c 14.8v; Kit de telemetria SiK Telemetry Radio V3 915MHz; frame S550 Hexacopter; buzzer genérico. Condições: pronto para vôo.
Generic Quadcopter

Especificações: Placa Controladora Navio2 autopilot shield para Raspberry Pi 3B+; 4x motores RCTimer BC2212 930KV Outrunner Brushless; 4x controladores eletrônicos de velocidade (ESCs) 3D Robotics ESC 20A; GPS built-in (Navio2); receptor FrSky X8R 8/16 canais; Bateria LIPo 5200mah 4s 40c 14.8v; GPS (redundante) Navio2 GPS/GNSS Antenna; frame genérico. Condições: pronto para vôo.
Custom FY450 Quadcopter (2x unidades)

Especificações: Placa Controladora Navio2 autopilot shield para Raspberry Pi 3B+; 4x motores Racerstar BR2216 Racing Edition 810kv; 4x controladores eletrônicos de velocidade (ESCs) RCTimer 30A; GPS built-in (Navio2); receptor FrSky X8R 8/16 canais; Bateria LIPo 5200mah 4s 40c 14.8v; GPS (redundante) Navio2 GPS/GNSS Antenna; frame FY450. Condições: pronto para vôo.
In-House Tricopter
Frame impresso em PLA (3D); 3x motores Generic Brushless 1000kv; 1x micro servo motor Tower SG90; 3x controladores eletrônicos de velocidade (ESCs) 3D Robotics ESC 20A. Condições: em desenvolvimento.
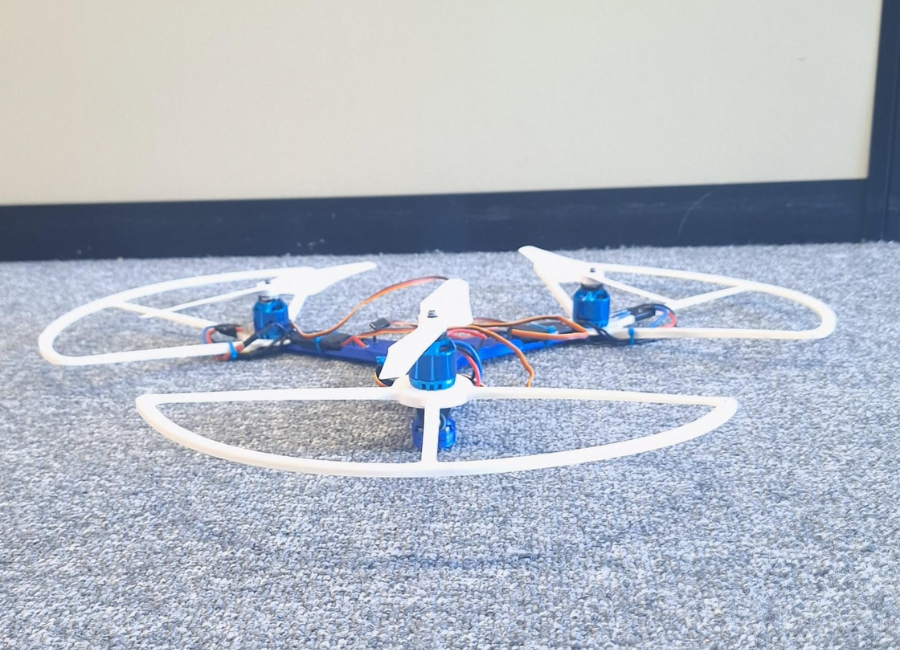
Mini-Drones (Múltiplas Unidades)

Placa Blackpill (STM32F411); IMU BNO055 (Adafruit breakout); módulo barômetro BMP385; 4x motores DC 716; 4x controladores PWM custom (diodo 1N4007, MOSFET si2300, resistor 10k ohms); Frame impresso em PLA (3D); bateria LIPo 1S 3.7v. Condições: em desenvolvimento.